应王在华教授邀请,同济大学航空航天与力学学院国家杰出青年科学基金获得者徐鉴教授于2019年11月6日访问了机械结构力学及控制国家重点实验室,并为师生作了题为“数据驱动动力学建模与运动调控”的学术报告。
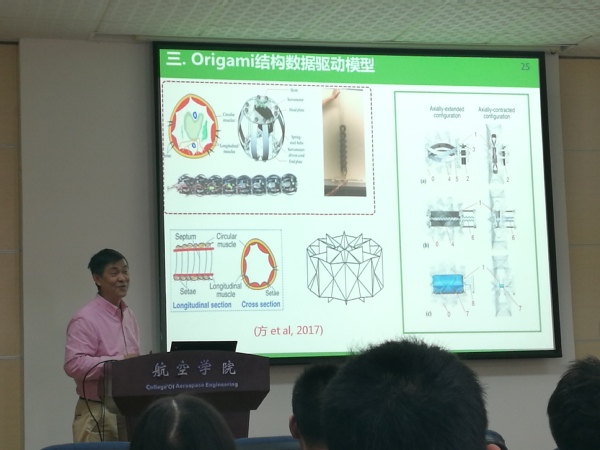
徐鉴教授的报告从数字化和数据驱动两个方面,针对蠕动波、折纸结构和并联机械臂的高精度控制,建立了蠕虫型机器人平面运动数字化模型、折纸结构的简化等效模型和数据驱动下的智能控制模型,并对多物理场引起的多传感器信息融合、数据驱动的动力学建模、复杂环境下基于动力学模型的学习控制等方面进行了展望。报告内容十分详实、生动,有趣,引起了在场师生的广泛兴趣和讨论。同时,徐鉴教授还结合自己多年的研究经历,与现场听众分享了他在非线性动力学、仿生结构与机器人等方面的研究心得和体会。报告会由高存法教授主持。
访问期间,徐鉴教授在高存法教授的陪同下,参观了国重实验室。实验室在学术研究、人才培养等方面取得的成就给他留下了深刻的印象,他表示衷心的祝贺。此次交流访问对于增强国重实验室与同济大学之间的学术交流以及合作研究将起到积极的促进作用。
徐鉴,男,教授,博士生导师,曾获国家杰出青年基金资助,目前兼任国家自然科学基金委员会重大研究计划“共融机器人基础理论与关键技术”专家指导组成员、中国力学学会常务理事、上海市力学学会理事长、《Theoretical and Applied Mechanics Letters》等期刊副主编和《力学学报》等国内外六种期刊的编委。早期从事分岔和混沌理论与应用、时滞系统动力学研究,近期从事仿生结构与机器人、下假肢系统动力学解析与优化、并联机械臂末端执行器智能化高精度控制等研究。重点关注提取生物体典型特征,对机器人结构-驱动-协同进行一体化解析和数据驱动建模,利用分岔理论对系统动力学行为进行分类,实现对刚-柔-软耦合结构、动力和控制等关键参数辨识,为控制的智能性、结构的刚度调控和柔顺性以及协同性优化提供设计方法。